Commits on Source (6)
-
 David Korčák authored61046b18
David Korčák authored61046b18 -
Roman authoredfceabfb8
-
Zotac Ksichtus authoredf7fdf3c6
-
Zotac Ksichtus authoreda0bb1f23
-
Zotac Ksichtus authored4d213f8e
-
Roman authored8c31acf7


can2_27_07_2022-17_51_26.pkl
deleted
100644 → 0
File deleted
candb/D1.json
deleted
100644 → 0
This diff is collapsed.
File deleted
candb/candb.py
deleted
100644 → 0
This diff is collapsed.
candb/log.asc
deleted
100644 → 0
This diff is collapsed.
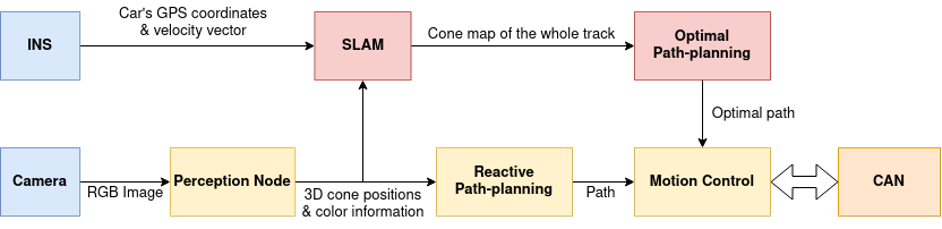
candb/pipeline.png
deleted
100644 → 0
{kind=link}
46.3 KiB
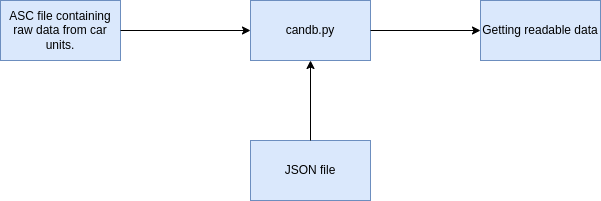
candb/pycandb.png
deleted
100644 → 0
{kind=link}
13.9 KiB
generate_newbie_task.py
0 → 100644
ksicht.jpg
0 → 100644
{kind=link}

324 KiB
slam_27_07_2022-17_51_27.pkl
deleted
100644 → 0
File deleted
vision/bboxes.npy
deleted
100644 → 0
File deleted
vision/bboxes_1.npy
0 → 100644
File added
vision/bboxes_10.npy
0 → 100644
File added
vision/bboxes_11.npy
0 → 100644
File added
vision/bboxes_12.npy
0 → 100644
File added
vision/bboxes_13.npy
0 → 100644
File added
vision/bboxes_14.npy
0 → 100644
File added
vision/bboxes_15.npy
0 → 100644
File added